Introduction
With this unit on Rotational Motion, we use all that we have learned up to this point with translational motion and apply it to objects that are rotating. While mostly similar to translational motion, rotational motion has some distinct differences.
Center of Mass
A key idea of rotational motion is center of mass. All objects have a center of mass, and this is the point where the force of gravity acts on an object. To find an object's center of mass, a method you can use is shown below. You hang an object from a string at two points. The center of mass is where these lines intersect.
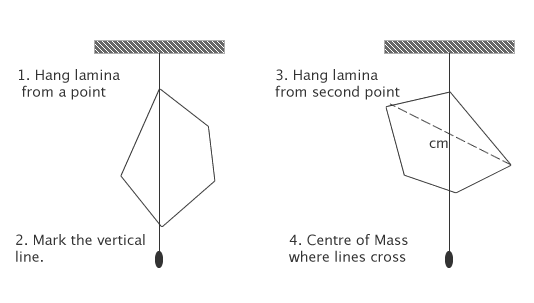
http://www.splung.com/kinematics/images/centre_of_mass/lamina-cm.png
Point Object - assume all mass is located at a single point.
Extended Object - assume all mass is spread throughout the object.
Until this unit, we have we have treated all objects as a single point at the center of mass, but in rotational motion, we draw extended force diagrams to represent mass at a non-single point. For extended force diagrams, draw a shape of the object and draw where the force acts on the object.
Extended Object - assume all mass is spread throughout the object.
Until this unit, we have we have treated all objects as a single point at the center of mass, but in rotational motion, we draw extended force diagrams to represent mass at a non-single point. For extended force diagrams, draw a shape of the object and draw where the force acts on the object.
Right Hand Rule
We use this rule for rotating objects because clockwise/counter clockwise changes depending on your perspective.
Use your right hand to trace the vector and the direction your thumb points is the direction of the torque.
Out of the page - towards you/up
Into the page - away from you/down
Advanced Right Hand Rule - uses thumb, pointer, and middle fingers. Tells you the force and torque arm, and your thumb is the direction of torque.
Use your right hand to trace the vector and the direction your thumb points is the direction of the torque.
Out of the page - towards you/up
Into the page - away from you/down
Advanced Right Hand Rule - uses thumb, pointer, and middle fingers. Tells you the force and torque arm, and your thumb is the direction of torque.
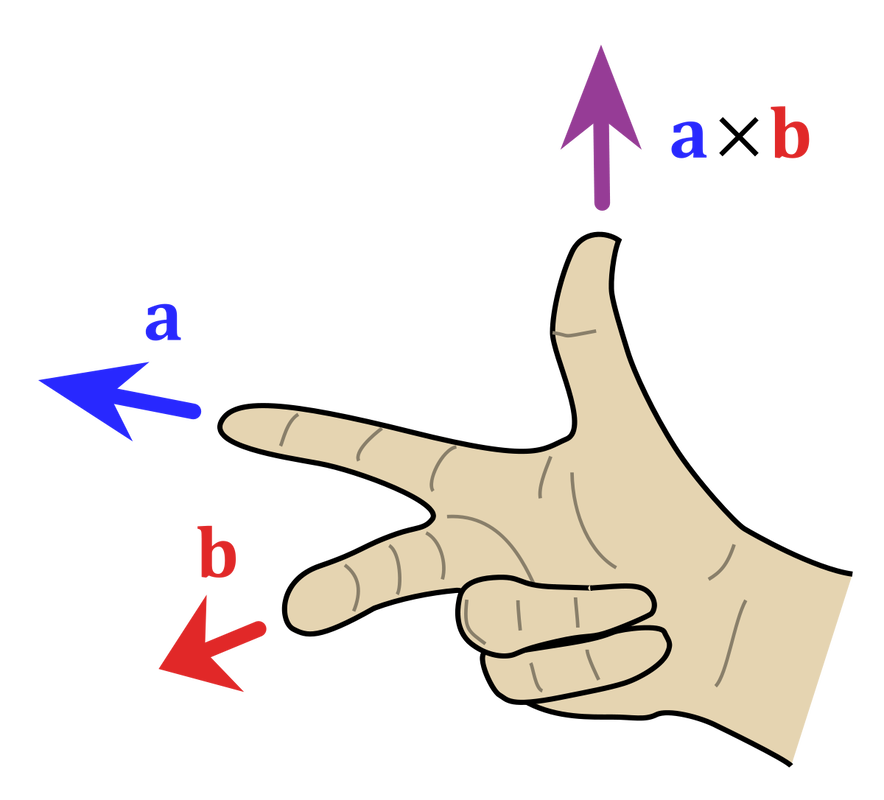
https://upload.wikimedia.org/wikipedia/commons/thumb/d/d2/Right_hand_rule_cross_product.svg/1200px-Right_hand_rule_cross_product.svg.png
|
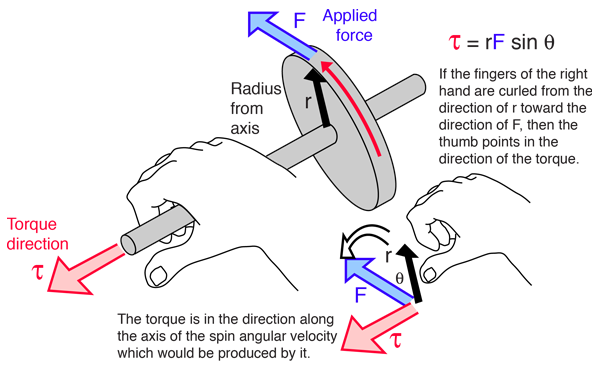
http://hyperphysics.phy-astr.gsu.edu/hbase/imgmec/vtord.png
|
Rotational Kinematics
The equations and formulas for rotational motion are similar to linear motion, but the units are all different.
Position (x) ------------> rotating objects have angular position (θ) in radians
Velocity (v) ------------> rotating objects have angular velocity (ω) in radians/second
Acceleration (a) -------->rotating objects have angular acceleration (α) in radians/second/second.
New Equations (just substituted variables)
ω = ω0 + αt
∆θ = ω0∆t + 1/2 α(∆t)^2
ωf^2 = ωi^2 + 2α∆θ
Position (x) ------------> rotating objects have angular position (θ) in radians
Velocity (v) ------------> rotating objects have angular velocity (ω) in radians/second
Acceleration (a) -------->rotating objects have angular acceleration (α) in radians/second/second.
New Equations (just substituted variables)
ω = ω0 + αt
∆θ = ω0∆t + 1/2 α(∆t)^2
ωf^2 = ωi^2 + 2α∆θ
Torque
Torque is a push or pull that attempts to change the rotation of the object.
Fulcrum is the point of rotation. The further away from the fulcrum, the easier it is to rotate.
Fulcrum is the point of rotation. The further away from the fulcrum, the easier it is to rotate.
Rotational Inertia
Rotational Inertia is an object's resistance to a change in its angular velocity
Equation : I = mr^2
Equation : I = mr^2
- Radius is more important than mass in this equation
- The farther away from the fulcrum the mass is distributed, the more rotational inertia the object has.
Rotational Energy
Rotational Energy is the energy due to the rotation of an object
Equation - 0.5mr^2ω^2
Important - An object can have both linear kinetic energy and rotational kinetic energy.
Equation - 0.5mr^2ω^2
Important - An object can have both linear kinetic energy and rotational kinetic energy.
Angular Momentum and Impulse
Angular Momentum is an object's resistance to stop rotating.
Equation - Angular Momentum = Rotational Inertia * Angular velocity (L = I * ω)
Just as in linear momentum and impulse, momentum is conserved in closed systems.
Just like linear impulse causes a change in linear momentum, angular impulse causes a change in angular momentum
∆L = ∑τ * ∆t
The change in angular momentum is the area under a torque vs. time graph.
Equation - Angular Momentum = Rotational Inertia * Angular velocity (L = I * ω)
Just as in linear momentum and impulse, momentum is conserved in closed systems.
Just like linear impulse causes a change in linear momentum, angular impulse causes a change in angular momentum
∆L = ∑τ * ∆t
The change in angular momentum is the area under a torque vs. time graph.
Widget is loading comments...
